

 联系我们
联系我们

库卡机器人TCP校正
操作步骤
1. 在主菜单中选择投入运行 > 测量 > 工具 > XYZ 4 点。
2. 为待测量的工具给定一个号码和一个名 称。 用继续键确认。
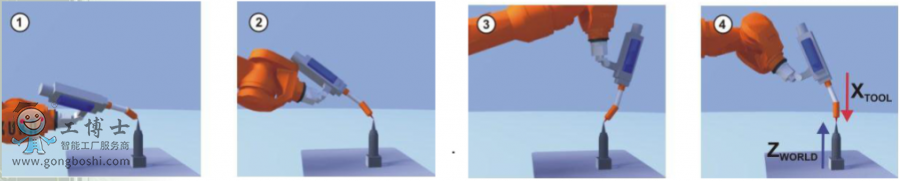
3. 用 TCP 移至任意一个参照点。 点击测量。 点击是回答安全询问。
4. 用 TCP 从一个其他方向朝参照点移动。 点击测量。 点击是回答安全询问。
5. 把第 4 步重复两次。
6. 输入负载数据。 (如果要单独输入负载数据, 则可以跳过该步骤。 )
7. 用继续键确认。
8. 在需要时, 可以让测量点的坐标和姿态以增量和角度显示(以法兰坐标系为基准)。 为此按下测量点。 然后通过退回返回到上一个视图。
9. 或者: 点击保存, 然后通过关闭图标关闭窗口。
或: 按下ABC 2 点法或ABC 世界坐标法。 迄今为止的数据被自 动保存, 并且一个可以在其中输入工具坐标系姿态的窗口自 动打开。
了解更多 库卡机器人