

 联系我们
联系我们

KUKA机器人焊接系统
主要包括:机器人系统、焊接系统、周边设备、安全设备、其他附件组成
机器人系统
机器人系统包括机器人本体、 机器人控制柜及示教盒组成。
1 机械手
2 机器人控制器(标准柜)
3 手持式编程器
4 连接电缆
机器人系统包括机器人本体、 机器人控制柜及示教盒组成。

机器人C4控制柜系统内部概览

1. 电源滤波器 2. 总开关 3. CSP4. 控制系统 PC 机 5. 驱动电源(轴7和8的驱动调节器选项) 6. 4 至 6号轴驱动调节器 7. 1至3号轴驱动调节器 8.制动滤波器 9. CCU 10. SIB/SIB 扩展型 11. 保险元件 12. 蓄电池13. 接线面板 14. 滚轮安装组件(选项) 19. 库卡 smartPAD
1 接线板
2 蓄电池
3 保险元件 Q3
4 保险元件 Q13
5 总开关
6 内部风扇
7 驱动调节器 KSP T12
8 驱动调节器 KSP T11
11 CSP
12 控制系统 PC 机
13 制动滤波器 K2
14 驱动电源 KPP G1
15 驱动调节器 KSP T1
16 驱动调节器 KSP T2
17 SIB/SIB 扩展型
18 CCU
11 CSP
12 控制系统 PC 机
13 制动滤波器 K2
14 驱动电源 KPP G1
15 驱动调节器 KSP T1
16 驱动调节器 KSP T2
17 SIB/SIB 扩展型
18 CCU
C4控制柜后面概览
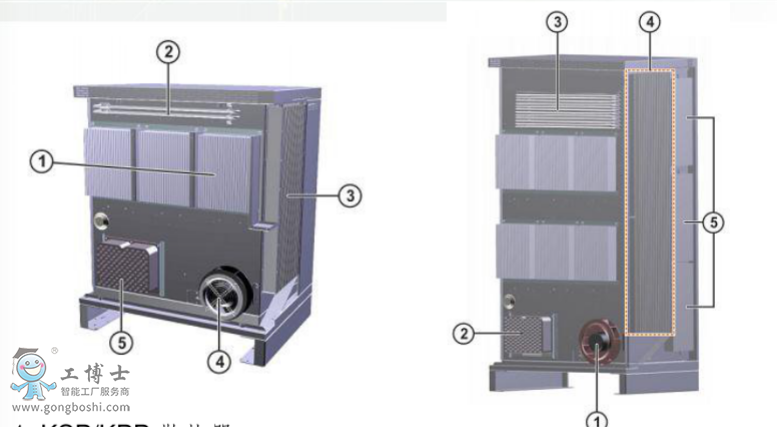
1 . KSP/KPP 散热器
2. 制动电阻
3. 热交换器
4. 外部风扇
5. 低压电源件
1 外部风扇
2 低压电源件
3 制动电阻
4 热交换器
4 热交换器
5 电源滤波器
C4标准控制柜PC 机接口
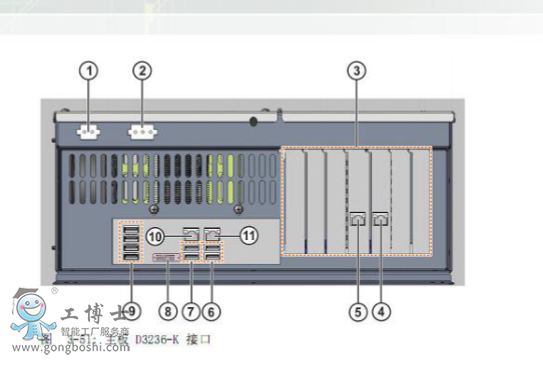
1 . DC 24 V 电源插头 X961 2. PC 风扇的 X962 插头 3. 现场总线卡插座 1 至 7 4. LAN 双网卡 DualNIC: 库卡控制器总线 5. LAN双网卡 DualNIC: 库卡系统总线 (6、 7) . 4 USB 2.0 端口8. DVI-I (支持 VGA, 借助 DVI - VGA 适配器) 。 9.4 USB 2.0 端口1 0. 板载 LAN 网卡: 库卡选项网络接口 11 . 板载 LAN 网卡: KUKALine Interface (库卡线路接口)
C4控制柜冷却循环回路

1 . 外部风扇空气入端
2. 低压电源件冷却器
3. KPP 空气出口
4. KSP 空气出口
5. KSP 空气出口
5. KSP 空气出口
6. 热交换器空气出口
7. 电源滤波器空气出口
8. 热交换器
9. KPC 进气道
10. 电脑风扇
7. 电源滤波器空气出口
8. 热交换器
9. KPC 进气道
10. 电脑风扇
1 外部风扇
2 侧面热交换器
3 上部热交换器
4 侧面空气出口
5 风扇 KPP_SR 和 KSP_SR.
6 低压电源件风扇
7 电脑风扇
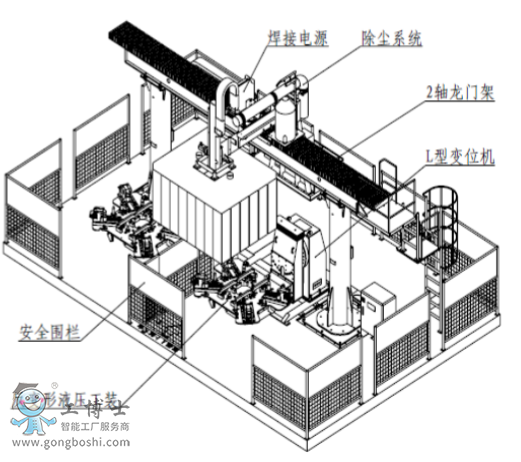
焊接系统

焊接系统包括焊接电源、 送丝机构、 电缆总成、 焊***。
周边设备
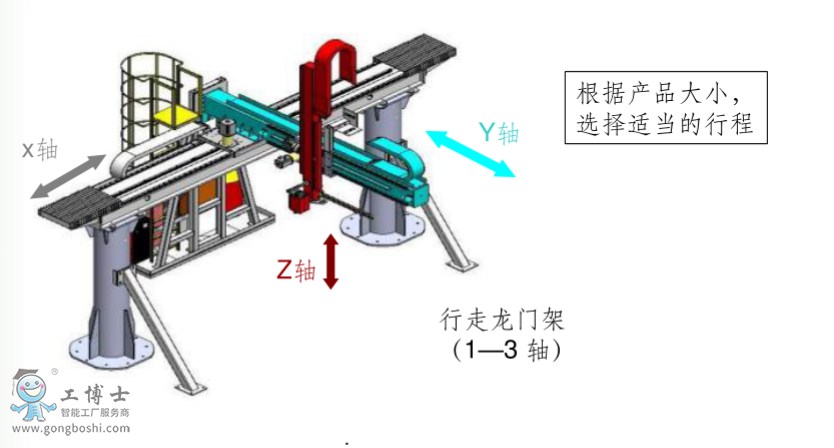
周边设备主要有行走龙门架(1—3 轴) , 工件旋转头尾架变位机或L型变位机, 工装夹具, 机器人行走的地轨等组成。 周
边设备需根据被焊工件的情况选定。
安全设备
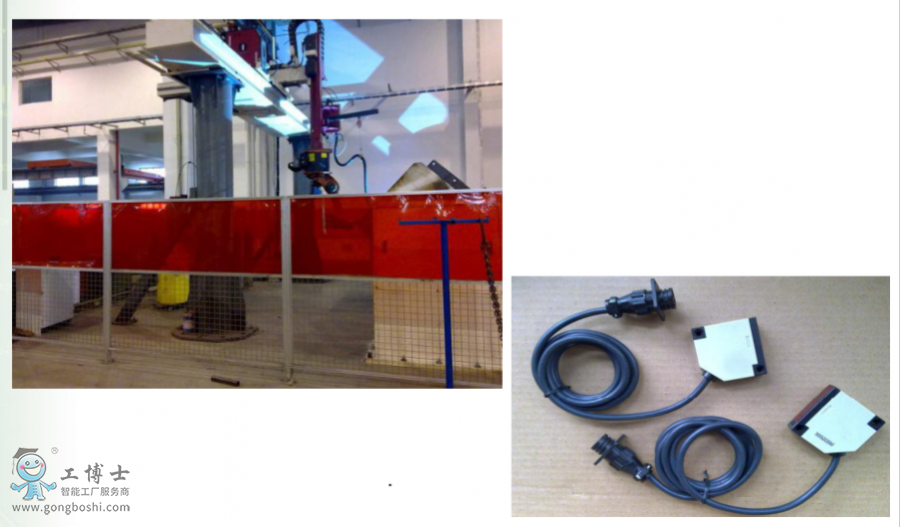
安全设备主要有安全围栏、 安全光栅等组成。
其他附件

其他附件包括防碰撞、 清***剪丝机构、 除尘设备等。
碰撞的作用: 减轻机器人及焊***碰到工件因撞击所造成的损坏程度。
原理: 防碰撞实际上为一常闭触点, 当碰撞发生时, 由于焊***偏离正常位臵而导致常闭触点断开, 信号返回控制系统, 机器人停止运行。
了解更多 库卡机器人
- 下一篇:库卡焊接机器人的发展趋势
- 上一篇:库卡机器人KCP示教盒常见故障维修