

 联系我们
联系我们

一.概要:
库卡通常情况下有四种操作模式,且不同模式的用途及速度情况如下图:

此外,当某种模式被选择后,在示教器上会有一个专门显示,例如,当机器人控制器被选为T1模式:
二.与其相关的系统变量:
1. $MODE_OP=Operating mode

2.系统变量:$T1/$T2/$AUT/$EXT

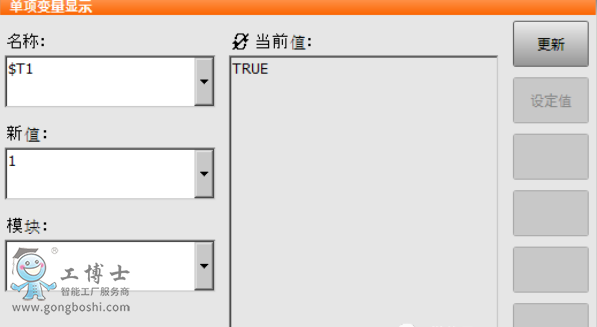
另外可以通过变量显示监测状态:
三.如何禁用T2模式:
T2模式其实可以通过设置C:\KRC\Roboter\config\system\common路径下的cabctrl.xml文件进行设置,它不在备份文件里,也不可以通过WV软件进行修改并
下载进去.具体操作步骤:
在示教器里,登陆***权限;
此路径C:\KRC\Roboter\config\system\common找到cabctrl.xml文件;
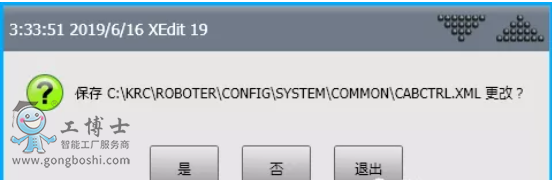
打开文件xml元素OpModes,将T2由on改为off:
4.保存修改的文件,选择确认:
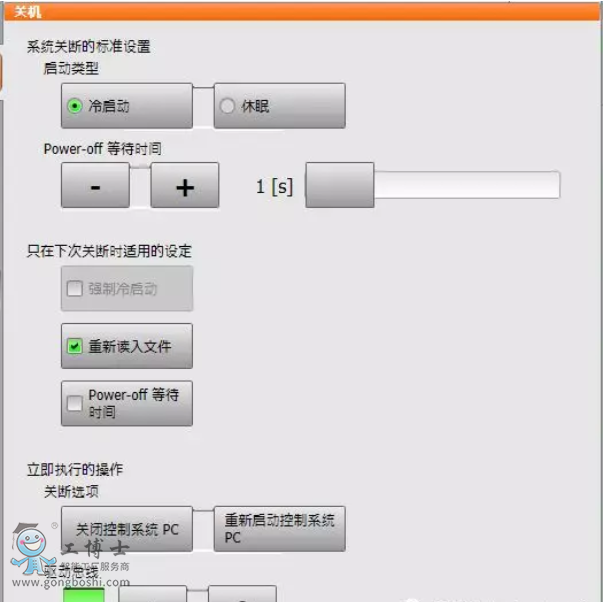
5.冷启动并加载文件的方式来重新启动系统:
***后看实际效果,T2模式不见了
但是,不建议大家这么去做,因为T2模式在调试中还是有用的。
了解更多 库卡机器人
- 下一篇:库卡机器人之倍率操作
- 上一篇:库卡机器人解释器R